DeustoCCM Team






Activities






























































Podcasts
Spain. 16.12.2018 – Euskadi Irratia – Enrique Zuazua: ‘Zientzialariak gorde, zaindu eta erakarri egin beharko genituzke’. See full article.
DyCon Presentation
DyCon presentación -Spanish Version
DyCon presentación –Basque Version
DyCon presentación -English Version
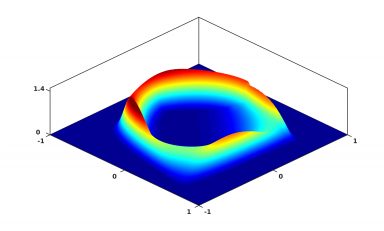
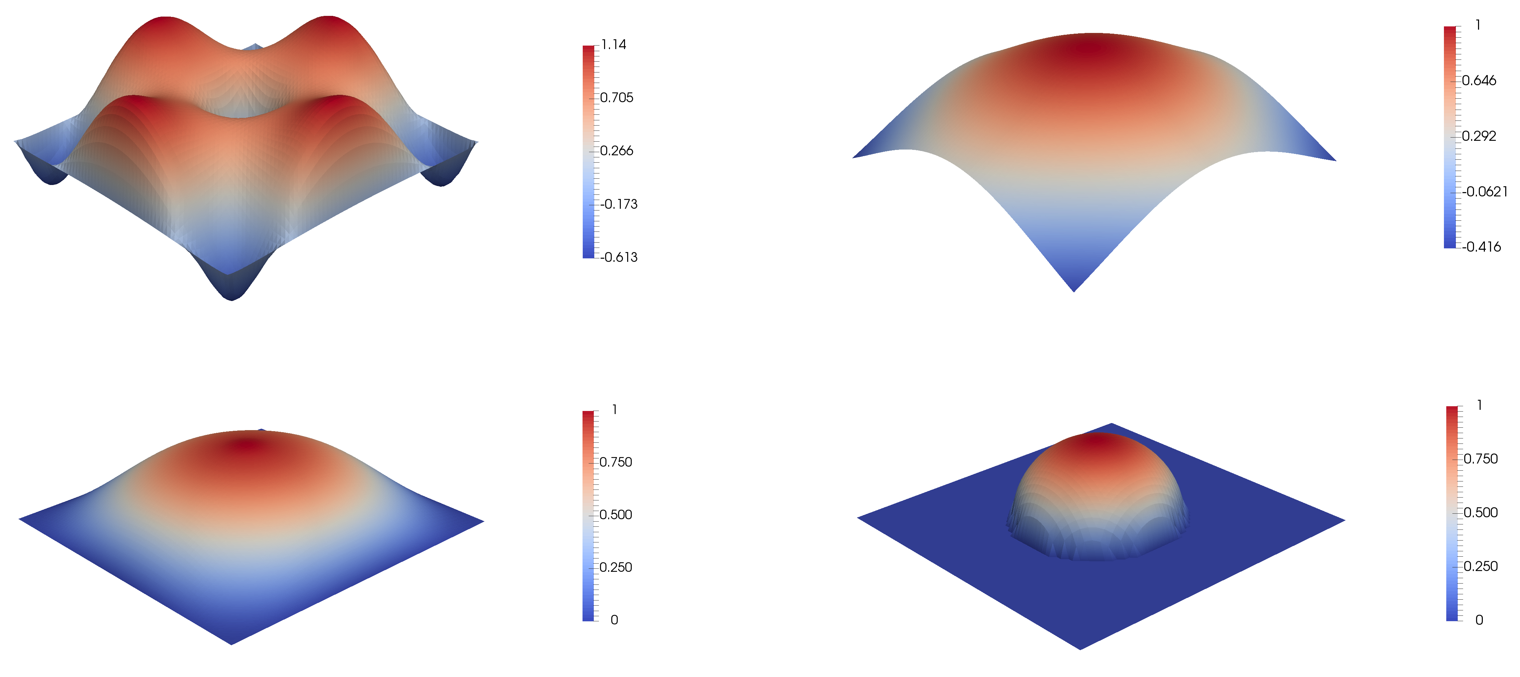
Computational images