PDF version | Download Matlab Code | Download Scilab Code | GITHUB
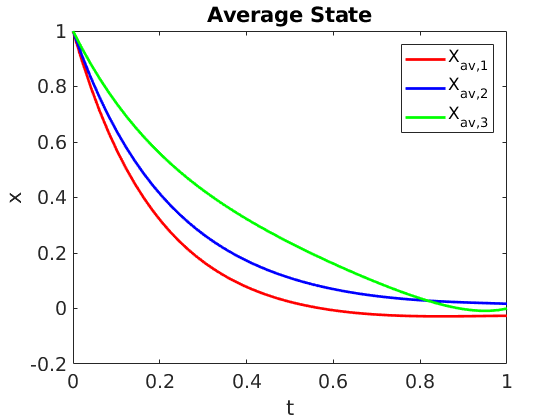
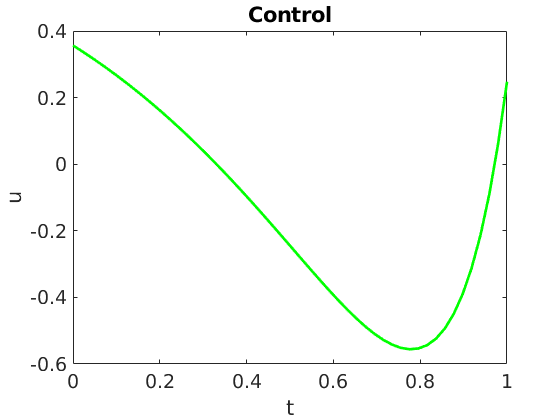
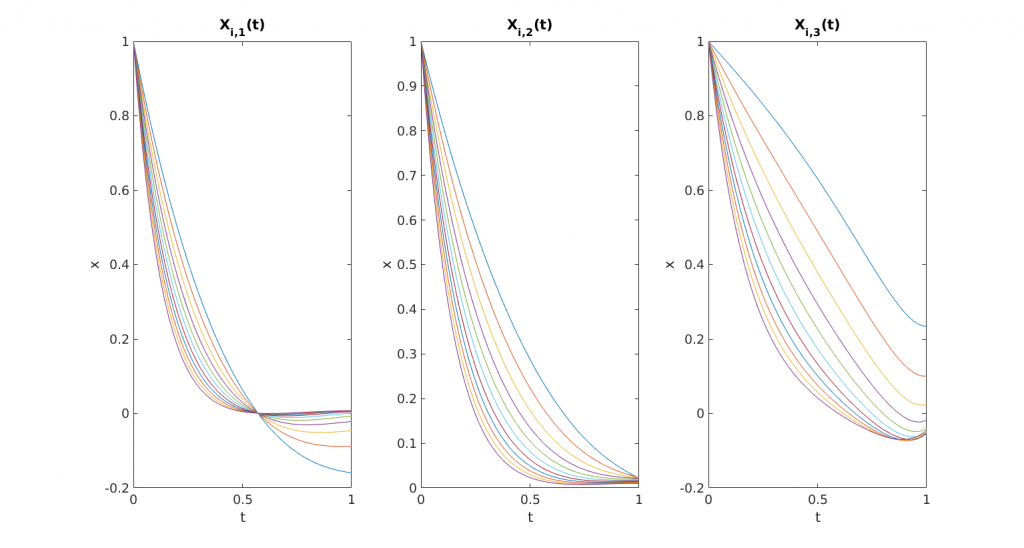
In this work, we address the optimal control of parameter-dependent systems. We introduce the notion of averaged control in which the quantity of interest is the average of the states with respect to the parameter family $\mathcal{K}= \left\{ \nu_i \in \mathbb{R}, \enspace 1\leq i \leq K \right\}$. More precisely, we are interested in solving the minimization problem
$$\begin{equation} \label{eq:costFunctional}
\min _{u \in L^2(0,T)} \mathcal{J}\left( u\right) = \min _{u \in L^2(0,T)} \frac{1}{2} \left[ \frac{1}{K} \sum_{\nu \in \mathcal{K}} x \left( T, \nu \right) – \bar{x} \right]^2 + \frac{\beta}{2} \int_0^T u^2 \mathrm{d}t, \quad \beta \in \mathbb{R}^+
\end{equation}$$
where $\mathcal{U}_{ad}$ is the space of admissible controls and $\bar{x}$ the average state target. The optimization problem (\ref{eq:costFunctional}) is subject to the finite dimensional linear control system
\begin{align} \label{eq:primalODE} Require: $A\left( \nu \right)$, $B\left( \nu \right)$, $x^0$, $u^{\left(0\right)}$, $\beta$, $T$, $\bar{x}$, $tol$ [1] E. Zuazua (2014) Averaged Control. Automatica, 50 (12), p. 3077-3087.
\left\{
\begin{array}{ll}
x^\prime \left( t \right) = A \left( \nu \right) x \left( t \right) + B \left( \nu \right) u \left( t \right), \quad 0 < t

Bibliography
Authors: Víctor Hernández-Santamaría, José Vicente Lorenzo, Enrique Zuazua
March, 2018