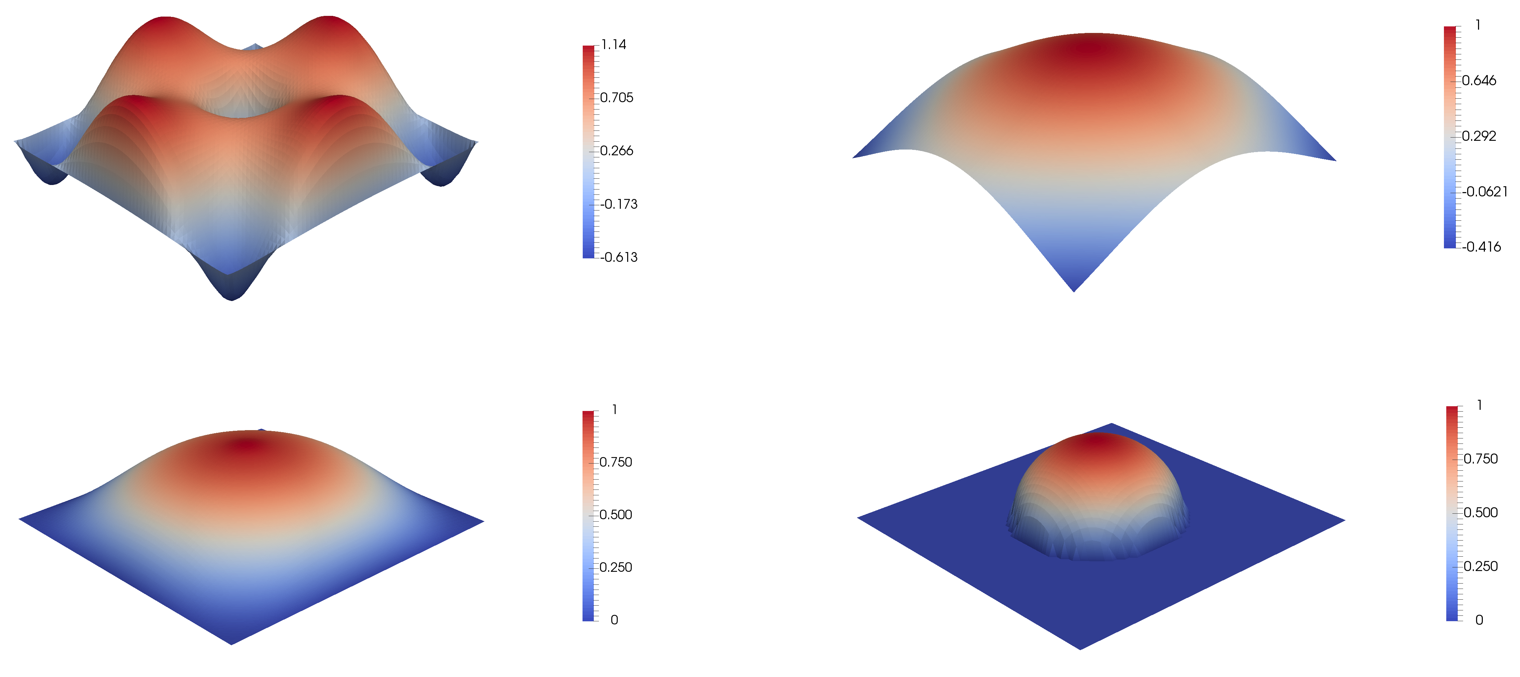
Optimal control of the obstacle problem: optimal state, target (top) optimal control, obstacle (bottom)