WKB expansion for a fractional Schrödinger equation with applications to controllability
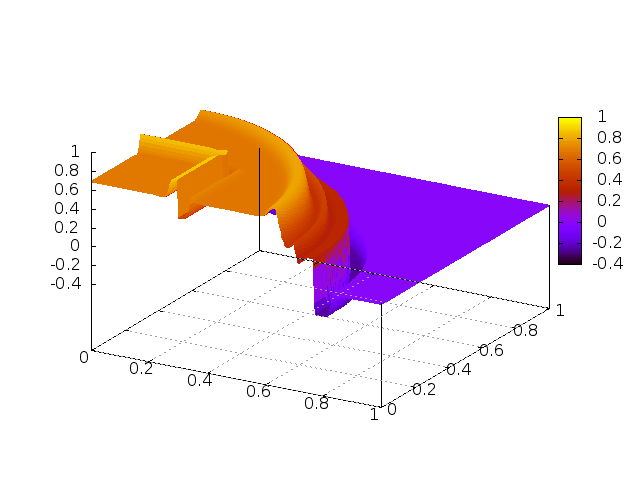
PDF version | Download Matlab Code... In [3], we develop a WKB analysis for the propagation of the solutions to the following one-dimensional nonlocal Schrödinger equation \begin{align}\label{main_eq} \mathcal{P}_s u:= \left[i\partial_t…